
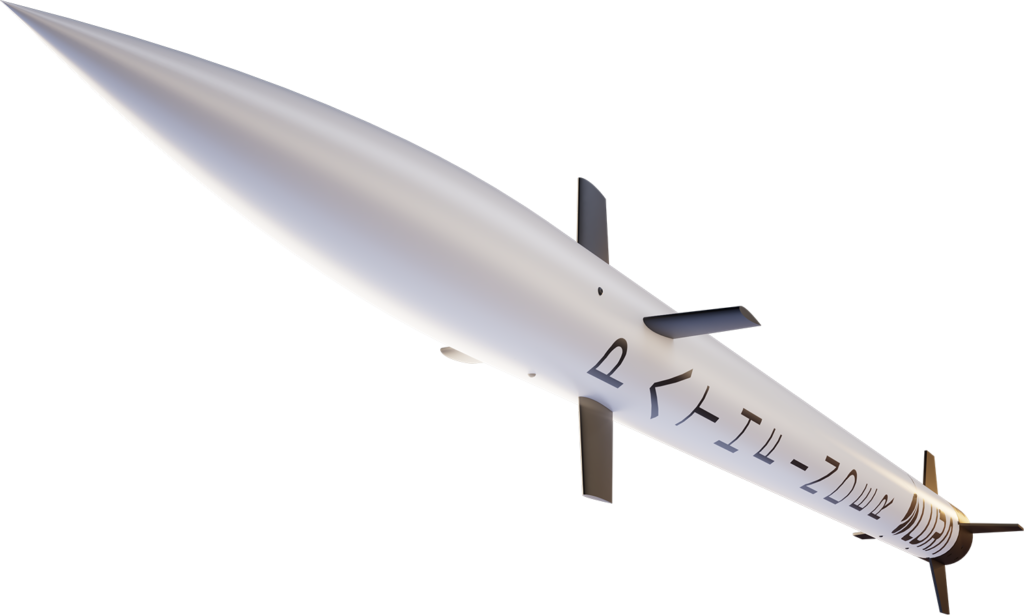









PATHFINDER
Pathfinder is a simple, single-ejection, low altitude rocket. Its nose cone, body tubes, coupler, and fins are all fibreglass. The fincan is mounted on bearings, to allow the rear fins to spin relative to the rocket. This prevents the deflected wake from the canards from causing the rocket to roll during flight.
Height:
1.92 m
Diameter:
0.10 m
Total mass:
6.9 kg
Target apogee:
~ 880 m (2,890 ft)
